什么是PID控制回路?
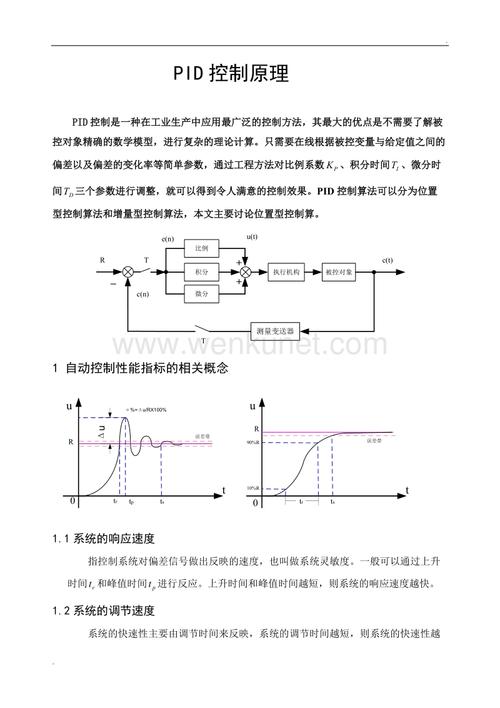
PID控制回路是一种常见的反馈控制系统,它通过对系统输出与期望值之间的差异进行连续的调整,以使系统输出逐渐趋近于期望值。PID是“比例-积分-微分”(Proportional-Integral-Derivative)的缩写,它是由三个控制参数组成的。

PID控制回路的原理
PID控制回路的原理基于反馈控制理论。它通过不断测量系统的输出值和期望值之间的差异,然后根据比例、积分和微分三个参数进行调整,以使差异逐渐减小,最终达到控制系统稳定的目标。
- 比例控制(P):比例控制是通过将差异乘以一个比例常数来调整输出。当差异较大时,比例控制可以快速响应并产生较大的调整量,但可能会导致超调和振荡。
- 积分控制(I):积分控制通过将差异的累积值乘以一个积分常数来调整输出。积分控制可以消除稳态误差,并提高系统的稳定性,但过大的积分常数可能导致系统的响应过度。

- 微分控制(D):微分控制通过将差异的变化率乘以一个微分常数来调整输出。微分控制可以减小系统的超调和振荡,但过大的微分常数可能导致系统对噪声敏感。
PID控制回路的应用
PID控制回路广泛应用于工业自动化、机器人控制、温度控制、飞行器姿态控制等领域。以下是一些常见的应用示例:
1. 温度控制:在温度控制系统中,PID控制回路可以通过调整加热器的输出功率来使温度保持在设定值附近。

2. 机器人控制:PID控制回路可用于控制机器人的位置、速度和力度,使其能够完成各种精确的任务。
3. 自动驾驶系统:在自动驾驶系统中,PID控制回路可以根据车辆的实际状态和期望状态来调整油门、刹车和转向,以保持车辆的稳定性和安全性。
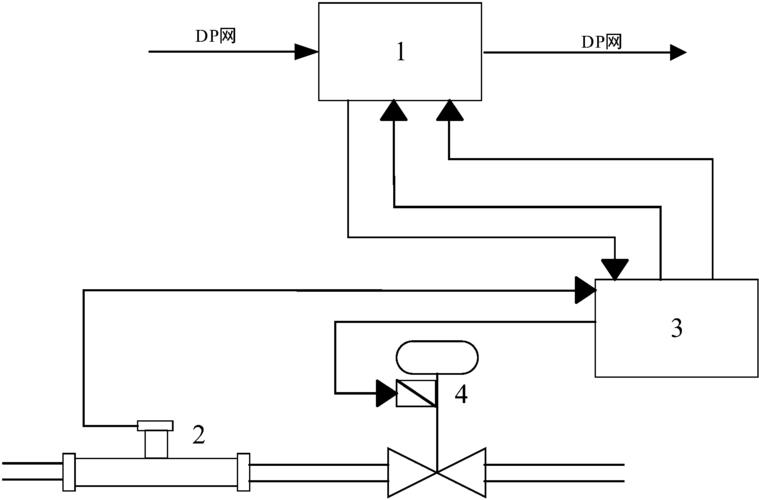
4. 液位控制:在液位控制系统中,PID控制回路可以通过调整液位控制阀的开度来保持液位在设定范围内。
PID控制回路的优缺点
PID控制回路具有以下优点和缺点:
优点:
1. 简单易实现:PID控制回路的原理简单,参数调整相对容易,适用于各种控制系统。
2. 可调节性强:通过调整比例、积分和微分参数,可以灵活地适应不同的控制需求。
3. 快速响应:PID控制回路可以快速对系统的变化做出响应,提高控制系统的动态性能。
缺点:
1. 参数调整困难:PID控制回路的参数调整通常需要经验和试验,对于复杂的系统可能需要较长时间和精力。
2. 对噪声敏感:PID控制回路在微分控制中可能对噪声敏感,导致系统产生不稳定的振荡。
3. 无法处理非线性系统:PID控制回路在处理非线性系统时可能表现不佳,需要采用其他控制方法。
 微信扫一扫打赏
微信扫一扫打赏