大家好,今天小编关注到一个比较有意思的话题,就是关于pid比例度是什么的问题,于是小编就整理了2个相关介绍的解答,让我们一起看看吧。
pid公式?
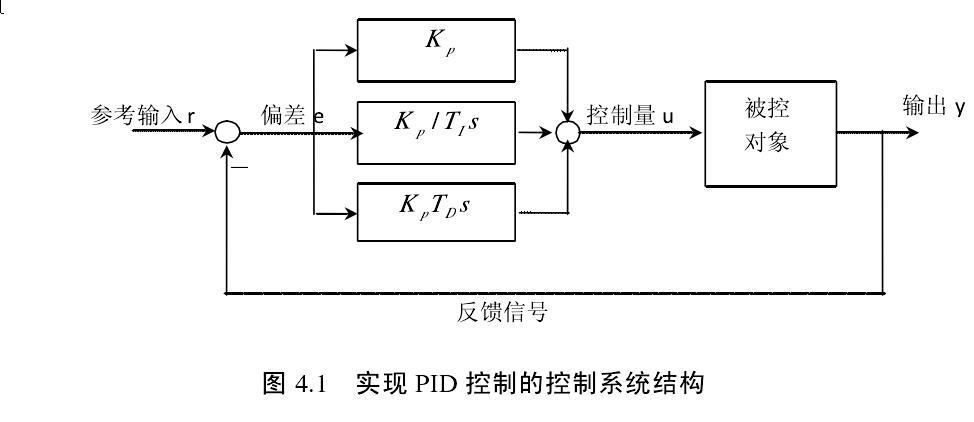
PID 控制器是一种广泛应用于自动控制系统中的控制器,它可以对被控制对象进行精确控制。PID 是由比例 (P)、积分 (I) 和微分 (D) 三个控制参数组成的,其公式如下:
-图1")
输出值 = Kp × (误差 + 1/Ti × 积分误差 + Td × 微分误差)
其中:
- Kp 是比例系数,用于调节控制器的灵敏度,其值越大表示控制器对误差的反应越强,但过大的 Kp 值可能导致系统不稳定。
-图2")
- Ti 是积分时间常数,用于控制积分误差的影响,其值越大表示积分误差对输出的影响越小,但过大的 Ti 值可能导致系统响应时间过长。
- Td 是微分时间常数,用于控制微分误差的影响,其值越大表示微分误差对输出的影响越小,但过大的 Td 值可能导致系统的震荡。
误差是被控制量与设定值之间的差异,积分误差是误差与时间的乘积之和,微分误差是误差的变化率。PID 控制器通过不断调整比例、积分和微分参数,使误差趋近于零,从而实现对被控制量的精确控制。
-图3")
PID的增量型公式:
PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】
PID算法具体分两种:一种是位置式的 ,一种是增量式的。
位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明显没有必要。而且小车的PID控制器的输出并不是绝对数值,而是一个△,代表增多少,减多少。换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。所以明白增量式PID就行了。
PID控制原理:
本系统通过摆杆(辊)反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
PID系统特点:
1、主驱动电机速度可以通过电位器来控制,把S350设置为SVC开环矢量控制,将模拟输出端子FM设定为运行频率,从而给定收卷用变频器的主速度。
2、收卷用S350变频器的主速度来自放卷(主驱动)的模拟输出端口。摆杆电位器模拟量
信号通过CI通道作为PID的反馈量。S350的频率源采用主频率Ⅵ和辅助频率源PID叠加的方式。通过调整运行过程PID参数,可以获得稳定的收放卷效果。
有谁知道PID的详细含义以及各自所起的作用?
PID是比例,积分,微分的缩写.
比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少
偏差.比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的
不稳定.
积分调节作用:是使系统消除稳态误差,提高无差度.因为有误差,积分调节就进行,直至无差,积分
调节停止,积分调节输出一常值.积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强.反
之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢.积分作用常与另两种调节规律
结合,组成PI调节器或PID调节器.
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产
生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除.因此,可以改善系统的动态性能.
到此,以上就是小编对于pid比例度是什么意思的问题就介绍到这了,希望介绍的2点解答对大家有用。
 微信扫一扫打赏
微信扫一扫打赏